
Moments of Inertia - Reference Table
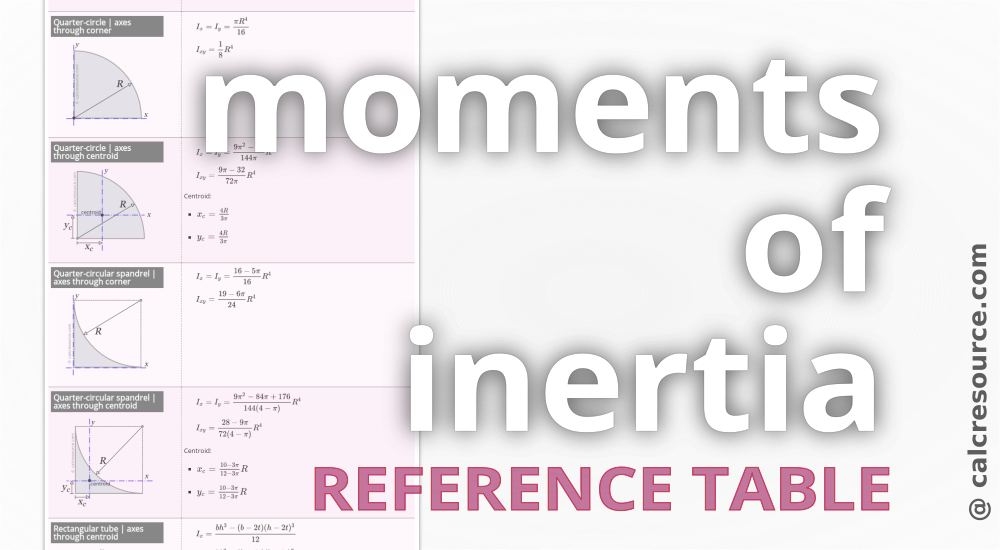
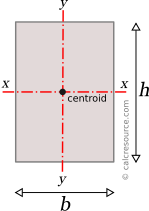
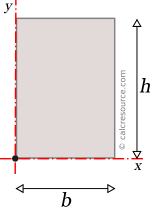
Analytical formulas for the moments of inertia (second moments of area) Ix, Iy and the products of inertia Ixy, for several common shapes are referenced in this page. The considered axes of rotation are the Cartesian x,y with origin at shape centroid and in many cases at other characteristic points of the shape as well. Also, included are the formulas for the Parallel Axes Theorem (also known as Steiner Theorem), the rotation of axes, and the principal axes.
Table of contents
Reference Table
Background
Moment of inertia
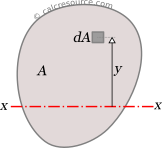
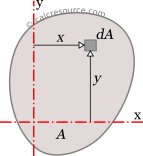
The moment of inertia, or more accurately, the second moment of area, is defined as the integral over the area of a 2D shape, of the squared distance from an axis:
where A is the area of the shape and y the distance of any point inside area A from a given axis of rotation. From the definition, it is apparent that the moment of inertia should always have a positive value, since there is only a squared term inside the integral.
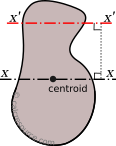
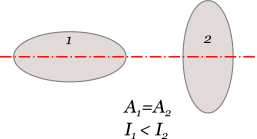
Conceptually, the second moment of area is related with the distribution of the area of the shape. Specifically, a higher moment, indicates that the shape area is distributed far from the axis. On the contrary, a lower moment indicates a more compact shape with its area distributed closer to the axis. For example, in the following figure, both shapes have equal areas, whereas, the right one, features higher second moment of area around the red colored axis, since, compared to the left one, its area is distributed quite further away from the axis.
Terminology
More than often, the term moment of inertia is used, for the second moment of area, particularly in engineering discipline. However, in physics, the moment of inertia is related to the distribution of mass around an axis and as such, it is a property of volumetric objects, unlike second moment of area, which is a property of planar areas. In practice, the following terms can be used to describe the second moment of area:
- moment of inertia
- area moment of inertia
- moment of inertia of area
- cross-sectional moment of inertia
- moment of inertia of a beam
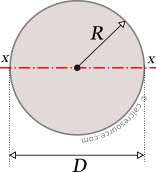
The second moment of area (moment of inertia) is meaningful only when an axis of rotation is defined. Often though, one may use the term "moment of inertia of circle", missing to specify an axis. In such cases, an axis passing through the centroid of the shape is probably implied.
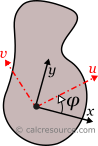
Product of inertia
The product of inertia of a planar closed area, is defined as the integral over the area, of the product of distances from a pair of axes, x and y:
where A is the area of the shape and x, y the distances of any point inside area A from the respective axes.
If either one of the two axes is also an axis of symmetry, then .
Also note that unlike the second moment of area, the product of inertia may take negative values.